Driving a “Lunar” Rover, From the Space Station
One small step for telepresence.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/94/ae/94aef691-23be-4dec-87ed-cb19d327d9cd/bridget_in_cave.jpg)
British astronaut Tim Peake did a bit of off-world driving today.
His “world,” for the past four months, has been the International Space Station, and it was from the station that Peake remote-controlled a six-wheeled rover located in Stevenage, England. The experiment, called SUPVIS-M, lasted about two hours, including 90 minutes of driving time. Judging from their initial reaction, experiment designers at the European Space Agency were pleased with the result.
Among world space agencies, ESA is leading the push to refine the basic techniques of space teleoperations, whereby future astronauts could operate robots on the surface of the moon or Mars without having to be physically present themselves.
Peake used keyboard and touch-screen commands on a laptop to drive a golf-cart-size rover called Bridget, an early prototype of the rover ESA plans to send to Mars on its next ExoMars mission in 2020. Bridget was parked in the “Mars Yard” at Stevenage, but despite the red rocks, this particular mission scenario was set on the moon. Peake’s job was to drive from a well-lit part of the yard to a dark area meant to simulate a cave or a crater in shadow, then use the rover’s visible and ultraviolet vision to identify and mark on a map certain rocks that had been painted to be UV-reflective.
It’s the kind of task a real astronaut/robot team might have to do in an unfamiliar lunar cave some time in the 2020s, and ESA project managers wanted to see how Peake managed with no prior knowledge of the cave’s layout and with relatively little guidance from them.
Here’s the training video he watched before the drive:

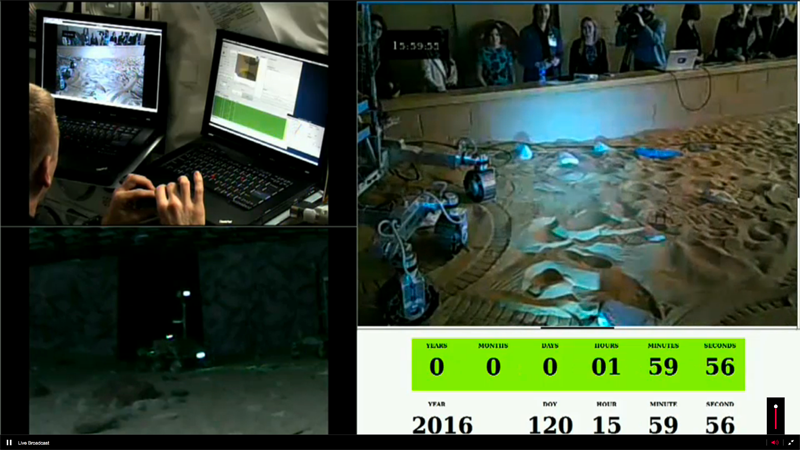
Here’s Peake’s setup before starting the drive. The laptop on the left shows him the view of the cave entrance through Bridget’s cameras. The one on the right shows him a map of his location and has buttons for commanding the rover.
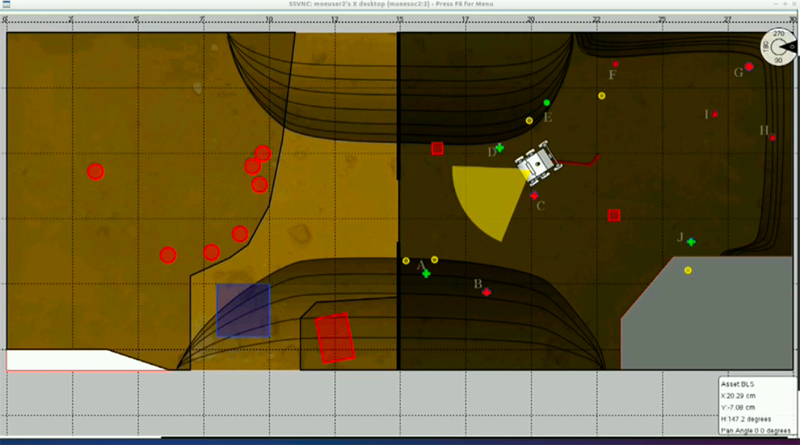
Peake’s map showed him which way the rover was facing, and which (green) rocks he’d already mapped correctly. He managed to find and map five rocks in his 90-minute roll through the cave (at a top speed of four centimeters per second).
After leaving the cave, Peake couldn’t resist turning the rover’s camera to point back at the gallery watching from outside the Mars yard. “Tim is admiring all the aliens,” said the ESA commenter. The experimenters will now review their data to figure out how and where the system—which uses “delay tolerant” communication to simulate the two-second lag time in lunar operations—could be improved.