Drones on the Moon
Is it possible to explore the Moon with low-altitude flying spacecraft?
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/accounts/headshot/blog_headshot_spudis-300x300.jpg)
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/69/c2/69c27e6b-e150-4175-9c34-949fb440893a/pitbot_in_cave.jpg)
Small autonomous (or teleoperated) aerial vehicles have revolutionized surveillance and warfare on the Earth by creating a perch for observation and permitting access to remote locations that are too dangerous, too difficult or too costly to send people. These small vehicles have shown themselves to be remarkably robust and capable, prompting people to dream up and design new ways to use them.
Drone properties and capabilities would naturally attract the attention of the spaceflight community, as there are many places waiting to be explored and characterized. Planetary surfaces possess many exotic and interesting landforms, some hundreds of kilometers in extent, with many features that could benefit greatly from prolonged examination from above. Moreover, some areas are nearly inaccessible from ground travel alone, including the vertical walls of scarps and cliffs, the peaks of steep mountains, and the deep interiors of caves and voids in the subsurface. Hovering flight to, around, and within such targets would offer many exploratory possibilities and revelations.
The difference is that terrestrial drones operate within the atmosphere of the Earth, a flight environment that is well understood and relatively easy to cope with. The atmosphere permits small vehicles to hover and translate via the efficient technique of air displacement, in which a rotating propeller can support vehicle movements laterally and vertically. This technique, with adaptations, may also work on Mars and Venus, as both of those objects possess atmospheres (one extremely thin and the other very thick).
Without an atmosphere, there is no easy way to support the mass of an “aerial” vehicle on the Moon, other than through some type of rocket propulsion. Of course, such a method works, but rocket engines burn through fuel at very high rates. This limits the amount of time available to fly and hover over targets of interest. The low gravity of the Moon is a plus—with less gravity, maintaining a hover is easier. But in general, flights across the Moon in such a manner will be limited by the indomitable tyranny of the rocket equation.
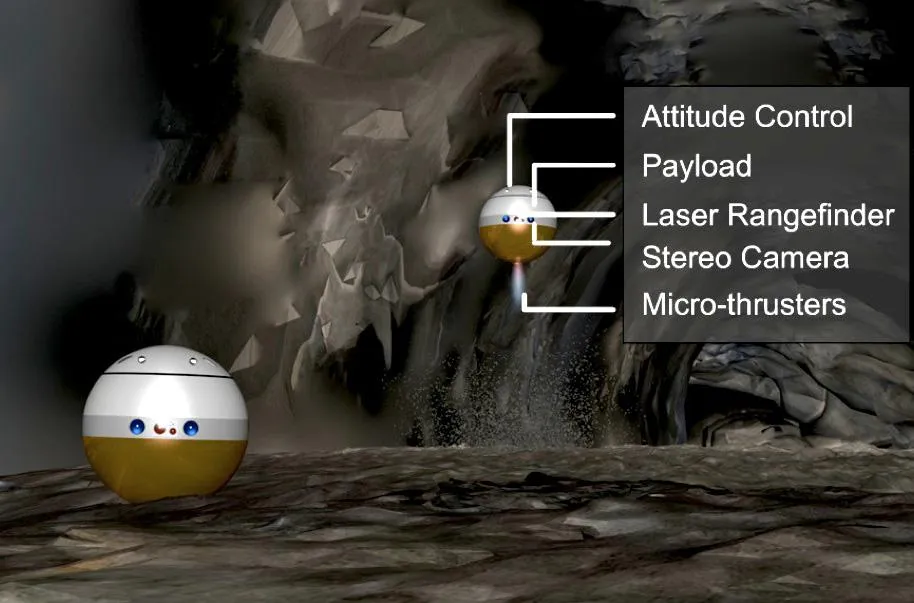
When presented with such formidable challenges for the construction of a lunar drone, there are those who have not shied from imagining the possibilities of flying vehicles to explore the Moon close up. One interesting concept comes from a proposed mission to study lunar lava caves. Mark Robinson, the Principal Investigator for the Lunar Reconnaissance Orbiter Camera, has proposed a mission he calls “Arne” (named after the fictional character Arne Saknussemm, in Jules Verne’s novel Journey to the Center of the Earth, who discovered a passage to the Earth’s interior through Iceland’s Snæfellsjökull volcano crater). Arne consists of a soft landing spacecraft and three small “pit-bots,” spherical flying robots about 30 cm in diameter. The lander would touch down inside one of the newly discovered lava pits found on the Moon; from the bottom of one of the pits, there is a direct line-of-sight to Earth for communications. Once landed, the small flying pit-bots would traverse into the side chambers of this opening into the Moon’s interior, survey the walls and determine if these pits are surface expressions of a cave system created by flowing lava.
The flying pit-bots of Arne could use a lithium hydride and peroxide propulsion system that levitates the vehicle for short, one-to-two-minute hops. Images, magnetic and thermal information, and obstacle avoidance data are taken for the cave walls during flight. Two flying pit-bots can mutually support each other, relaying their data back to the lander at the tube opening, which can then be sent directly back to Earth. By using alternate hops of each pit-bot, they can move into and survey several hundred meters of an existing cave system.
These drone-like vehicles could be a relatively inexpensive way to explore lunar lava tubes. We might also apply this technique to the exploration of above-ground features on the lunar surface. Landforms like sinuous rilles (such as the Rima Hadley—a winding valley briefly investigated during the 1971 Apollo 15 mission) exposes hundreds of kilometers of mare crust in its walls. Flying drones could travel the length of the rille, examining wall outcrops in many wavelengths, looking for compositional variations to decipher the history of the exposed lavas. Flights through and into craters with very steep walls are also possible, so that shock melt deposits (which tend to be found on the floors of craters) can be accessed and studied. Spectacular, 360-degree views from high-flying drones could obtain geologic information at scales in between those obtained from orbit and those made by traversing the ground, allowing us to understand the geology of large areas. Such capability would be particularly valuable in prospecting and mapping the polar regions, where ice deposits are irregularly and heterogeneously distributed deep within permanently shadowed craters.
Many who saw the classic film 2001: A Space Odyssey fondly recall the “Moon bus” scenes of people and cargo being transported across the lunar surface—smoothly and quickly flying across rough, impassible areas of the Moon at low altitudes. While this made for a very compelling future vision, such flight is extremely difficult to achieve in practice. Sub-orbital “hops” (ballistic flights from point-to-point) are possible, but come at fairly high cost—it takes nearly as much energy to fly hundreds of kilometers on the Moon in a ballistic hop as it does to go into orbit and then descend elsewhere. In both cases, one must burn the rocket engine twice—once to take off (the direction and length of the burn determining the flight path) and then again to slow down and land softly (the same amount of energy). For long-distance travel across the lunar surface, it is best to approach distant targets from orbit. But even this mode of travel is easier to attain than the “Moon bus” approach of hovering with downward-pointing rockets and then translating laterally with another rocket engine, the only configuration that would work on the Moon. The need for a reliable, local fuel source can be mitigated through the development of lunar resources, in particular, the polar ice deposits.
Rocket propulsion makes space travel possible, but it is grossly inefficient for slow, leisurely travel above planetary surfaces—a principal requirement for scientific exploration. Flying drones may be somewhat easier on Mars and Venus due to the presence of an atmosphere in those locales, but that presence can create its own issues. While it is tempting to dream of gently floating above the terrain of an alien world, the physics of real space travel dictates that such flight comes with limitations. With a limited ability to “fly,” drone flights on the Moon are possible but limited. For now, the use of drones will likely be for short distance reconnaissance and brief trips to inaccessible locales.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/accounts/headshot/blog_headshot_spudis-300x300.jpg)