Hopping Across Mars
Planetary rovers might some day trade their wheels for something simpler.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/mars-hopper-631.jpg)
Driving on Mars, where low gravity and loose sand combine to give lousy traction, isn’t as easy as NASA’s wheeled rovers Spirit and Opportunity make it look. So a team of Canadian space engineers suggests a better way to roam the Red Planet: by hopping. Their foot-long, two-pound robot would even take what’s normally considered a problem—the extreme daily temperature swings on Mars—and use it to create the energy necessary to hop.
A Canadian Space Agency review of Mars missions launched between 1996 and 2003 found that small spacecraft had an advantage over large landers: they carried more science instruments per pound. Unfortunately, designing micro-rovers is hard. Maneuvering a tiny, wheeled rover on Mars can be like driving a car on ice, says Erick Dupuis, manager of robotics at the CSA. And every pebble becomes an obstacle. “When it’s that small, the challenge for mobility is that everything is big.” Robots with legs can overcome some of these problems, but more joints and linkages increase the risk of mechanical failure.
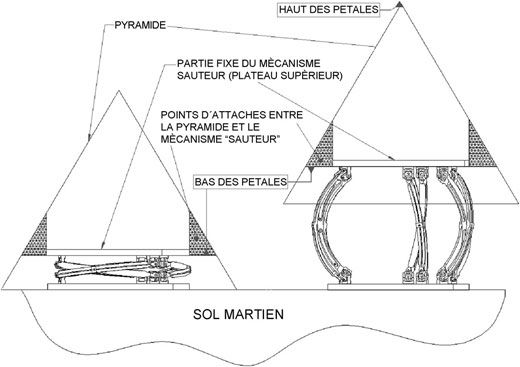
So Dupuis and colleagues looked at machines that push off the surface to hop, rather than roll. The engineers began with the same kind of tetrahedral landing craft that contained the Spirit and Opportunity rovers. The four-sided structure has three hinged petals and a base that houses the hopping device. Each morning, the rising sun warms a shape-memory alloy, causing the three petals to open. No matter which of the petals lies on the ground, the force of opening props the hopper onto the base. “This is a very robust geometry when it comes to landing on any face and self-righting,” says Dupuis.
Once oriented to the Sun, the petal’s solar cells generate electricity to power the robot’s science instruments and communications antenna. During the day, the robot could take photographs, measure local magnetic fields and temperatures, study the surface geology, and store the data for later transmission.
Then, as the sun sets and the temperatures drop, the cooling of the shape-memory alloy causes the petals to contract again and shut. That in turn cranks a torsion spring that generates the hopping force. Once the spring is loaded, an impulse triggers its release. A circular scissor mechanism launches the robot into the air along an arc three feet high and 10 feet long (the low Martian gravity helps here). After a crash landing, the hopper lays dormant overnight. “All we were looking at in our case was survival—the hopper is powered down [at night],” says Dupuis. When the sun comes up again, the shape-memory alloy shrinks, the petals open, and the hopper begins another day on Mars as the solar-powered instruments stir to life.
What scientists would lose in controllability—hoppers can’t easily be pointed toward specific targets like rovers can—they’d gain in numbers. Because the hopper designed by the CSA is about 100 times lighter than Spirit or Opportunity, a similar-size mission could deliver a horde of robot landers to a planetary surface. “Eventually, some happen to chance on something interesting,” says Dupuis. He refers to this as “serendipity science.”
The Canadian team isn’t the first to come up with the idea of planetary hoppers. The Japanese Hayabusa spacecraft in fact carried a mini-hopper called Minerva to the asteroid Itokowa in 2005, although it failed shortly after deployment. The Russian space agency included a hopper on its 1988 mission to the Martian moon Phobos, which also failed to reach its destination.
Other researchers, like Steven Dubowsky of the Massachusetts Institute of Technology and New Mexico Tech planetary scientist Penny Boston, have proposed micro-hoppers that could explore the surface and subsurface of Mars.
What the Canadian design adds is simplicity, robustness, and a battery-free means of locomotion.
The CSA researchers need additional funding to build a working prototype. Last year, they got as far as figuring out how to make more than one hop per day. Excess electricity not used by the hopper’s instruments would be used to heat and expand the shape-memory alloy. This would accelerate the spring-loading rate, prematurely providing the hopper with the boost needed for another launch. Next on the to-do list would be to gain better control over the direction and angle of hopping, and to confirm that the hopper can survive repeated take-offs and landings.