The Long, Frustrating Saga of the Mole on Mars
Digging on another planet is harder than it looks.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/4e/6a/4e6a195a-6d48-4782-a380-f07c13626abb/14j_fm2021_hi-res_j_pia22227_live.jpg)
“When the Mole first started digging, I was ecstatic. ‘Yes! We’re actually going to make it down!’ Then it popped out [of the hole].”
Troy Lee Hudson sighs. He’s the Jet Propulsion Lab scientist and engineer who led NASA’s nearly two-year-long effort to excavate beneath the surface of Mars, describing his despair when he first got the news, early in the mission, that the robotic digging machine was literally moving in the wrong direction.
“ ‘Am I seeing this right? Am I looking at the images in the wrong order?’ ” he recalls thinking. “That was my brain going through the stages of grief. I was in denial. I knew that what I was seeing could spell the end of the Mole’s work. But even if it didn’t, I knew the path back was going to be a long, hard slog. And it has been.”
The Mole is a combination heat-flow probe and self-contained pile driver designed to burrow five meters (more than 15 feet) into the soil of Mars. It is one of three scientific instruments that in 2019 landed on the Red Planet as part of the InSight mission. Since then, a seismometer has been measuring planetary vibrations (including the first confirmed marsquakes) while two radio antennas have tracked wobbles in the planet’s orbit. But instead of being the rock star of the mission, the Mole turned out to be a temperamental diva.
“Quite frankly, there have been several times of great disappointment and frustration,” said Tilman Spohn of the German Aerospace Center (DLR, in German), the principal scientist for the Mole, speaking last fall when there was still hope for success. “I was having a little vacation with my wife when we had another setback. When I got the news, it ruined the whole day for me. And there were other days that have been ruined.”
The Mole began misbehaving in February 2019. In the two years since, a multinational group of scientists and engineers dreamed up a series of bold fixes, or what they hoped would be fixes. But in January of this year, they threw in the towel. After a last, fruitless attempt on January 9, the team called an end to their efforts. InSight will keep doing science with its other instruments, but that’s it for the Mole.
Why was it digging in the first place? “We’re trying to get one magic number out of the Mole, which is the heat flow coming out of the interior at that location, from which we can extrapolate the heat flow coming out of the planet as a whole,” explains Sue Smrekar, the program’s deputy principal scientist.
Examining a planet’s interior provides clues about how it formed and evolved and informs our understanding of how celestial bodies condensed out of the solar nebula four-and-a-half billion years ago. The only other interior measurements of an alien object were made on the moon, where Apollo astronauts used hand drills to get a few feet below the lunar surface and where China’s Chang’e 5 just drilled for samples.
Digging on Mars was a major goal when the InSight mission—for Interior Exploration using Seismic Investigations, Geodesy and Heat Transport—coalesced a decade ago. Calculating heat loss would allow scientists to make educated guesses about the composition of Mars’ crust, mantle, and core. NASA has to embed sensors at least three meters underground, where readings won’t be affected by fluctuating temperatures at the surface.
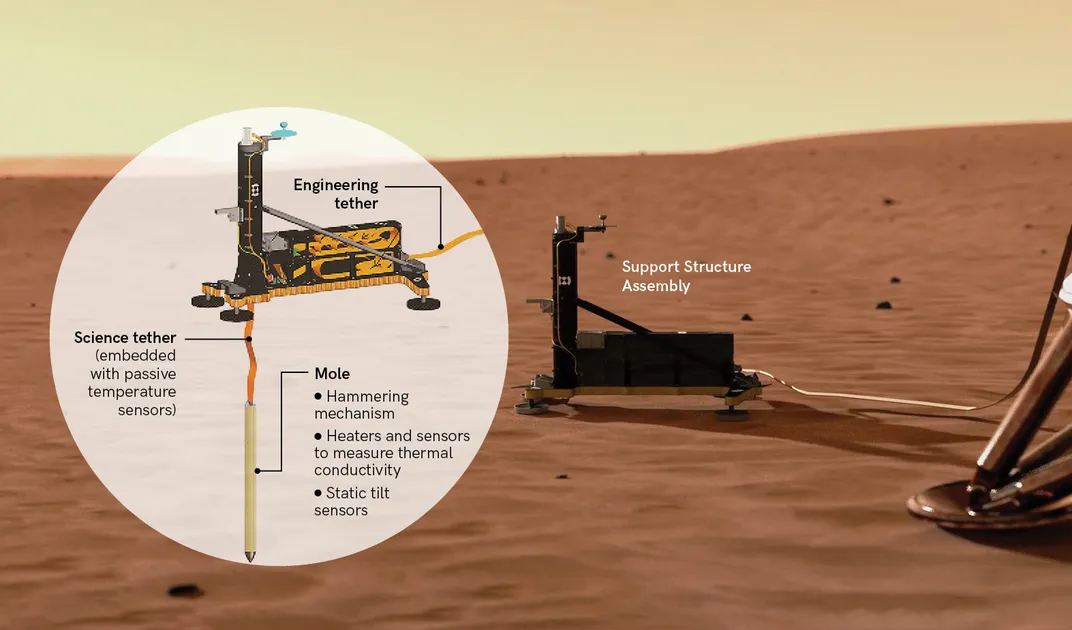
You might think a conventional rotary drill could do the job, but the bulk of the structure needed to counteract the torque of a spinning bit renders a drill too heavy and power-hungry for extraterrestrial missions. Instead, the DLR created the Mole, the centerpiece of a larger instrument known as the Heat Flow and Physical Properties Package, or HP3.
The Mole is based on technology developed in Russia in the 1990s. For the InSight mission, DLR teams in Berlin and Bremen incorporated a heavier-duty hammering system developed in Poland. It is a self-propelled jackhammer housed within a slender 40-centimeter-long (about a foot) hull.
Inside the tube, a DC motor turns a cam-and-roller assembly to retract a tungsten hammer against a coiled drive spring. When the hammer is released, it violently thrusts forward against a titanium anvil at the tip of the hull before recoiling against a brake spring. Trailing out the rear end, or back cap, of the Mole is the Science Tether—a long, flexible Kapton ribbon impregnated with electronic components—that connects to the HP3. In theory, when the Mole finishes digging, the tether will be stretched out in the hole excavated behind it. Temperature readings will be taken by 14 platinum resistance sensors.
The Mole was a perfect fit for the mission proposed by JPL’s Bruce Banerdt—who is now InSight’s principal scientist—for NASA’s Discovery program, which promotes low-cost, tightly focused science projects. “When you do a mission like this, you can’t afford to develop things from scratch,” he says.
Although the Mole aced its audition in a testbed at JPL, the InSight team knew it would face daunting challenges on Mars. It’s impossible to realistically mimic Martian gravity, which is only one-third as strong as Earth’s. There is also no way to perfectly predict the physical properties of the sandy soil, known as regolith, on the Red Planet—a critical unknown because the Mole relied on friction against the hull to keep it from recoiling out of the hole it was digging.

Carried on an Atlas V rocket, InSight was launched from Vandenberg Air Force Base in May 2018. Six months later, the 794-pound lander touched down in a smooth plain named Elysium Planitia. Over the next three months, all of the scientific instruments were placed on the Martian surface by the Instrument Deployment Arm, a 5-foot-9-inch-long contraption able to articulate at three joints.
The Mole began hammering in February 2019, and immediately breached the surface. The team had commanded 5,000 hammer strokes, which should have taken the Mole down more than two feet. Instead, it barely reached halfway. Three days later there was another round of hammering. “Initially, it was moving down faster than we expected, so it was completely exhilarating,” Smrekar recalls. “Then it just stopped, and we were all crushed. We were afraid that it had hit a rock, and if the rock was big enough, it would have been ‘game over.’ ”
But Smrekar and company didn’t lose hope. Even as Spohn detailed all the problems the Mole had encountered on the DLR mission blog, his posts were full of cheerful comments such as “More surprises on Mars!” and “Stay tuned, it is not at all over, but the Mole is not making our lives easier these days!”
With progress stalled, an international Anomaly Response Team formed to come up with on-the-fly solutions. The next month brought a series of diagnostic hammering events, with InSight’s seismometer calibrated to provide additional information. Scientists suspected that the Martian regolith wasn’t providing the friction necessary to compensate for the recoil. Instead of allowing the Mole to burrow deeper into the ground, each hammer stroke was causing it to back out of the hole.
But the data was ambiguous, and the team couldn’t see what they called “the Mole hole.” They decided to move the support structure out of the way to open up the field of view of the 3D camera mounted on the articulating arm. In June 2019, the Instrument Deployment System Operations Team (or “Arm Team”) began repositioning the support structure and trained the lens on the Mole hole. The images downloaded to JPL shocked the team.
The Mole wasn’t snuggled into the regolith like a beach umbrella sunk into the sand. Instead, it looked more like a swizzle stick slumped in a cocktail glass. Turns out that the duricrust, a surface layer of cemented, hard-packed sand similar to what you might find in a desert, was much deeper than expected. Evidently, the Mole had wobbled like a spinning top—a motion referred to as precession—while hammering. But instead of backfilling the hole with loose regolith, the duricrust had simply worn away, leaving a yawning gap on one side of the hull.
Now the problem was clear. The solution? Not so much. The Anomaly Response Team went into overdrive. Although the core group was roughly 10 engineers and managers, supplemented by scientists such as Spohn and Banerdt, teleconferences often stretched to 30 people in Pasadena, Berlin, Bremen, Cologne, and Bern, Switzerland.
The bravest members of the team suggested that the scoop on the end of the arm be used to drive the Mole deep enough into the hole to get purchase on virgin regolith, after which it should be able to resume burrowing on its own. But this would mean getting dangerously close to the fragile Science Tether with a device that had been designed for heavy lifting.
“Our positioning accuracy is around a centimeter or a little bit less than a centimeter, and the place where we had to place the scoop was about two-and-a-half, three-and-a-half millimeters wide—much less than our positioning accuracy,” says Khaled Ali, the engineer leading operations of the robotic arm.
Plan B was more conservative. Instead of pushing on the back of the Mole, the idea was to add friction by positioning the scoop against the exposed side of the hull and pressing it laterally against the regolith. But not before plenty of practice sessions in a pair of testbeds at JPL with an engineering model of the arm and an exact copy of the Mole. In October, the Mole resumed digging while being “pinned” by the arm.
But the pinning technique would work only as long as the Mole was exposed. As soon as the back cap reached ground level, the effect would be like pulling out a chair from somebody who was about to sit down, and the suddenly unbraced scoop would swing across and sever the tether like a guillotine. So the scoop was retracted. Still, it was hoped that the fully embedded Mole now had enough friction to continue digging on its own. But instead of burrowing more deeply into the regolith, it reversed halfway out of the hole.
“That was utterly crushing,” Hudson says. “The Mole topped out ever farther than it had been exposed initially. There were worries that any further attempts to assist it would result in it falling out of the hole and laying flat on the ground. Besides being embarrassing, that would mean that the experiment was over. There wouldn’t have been anything more we could do.”
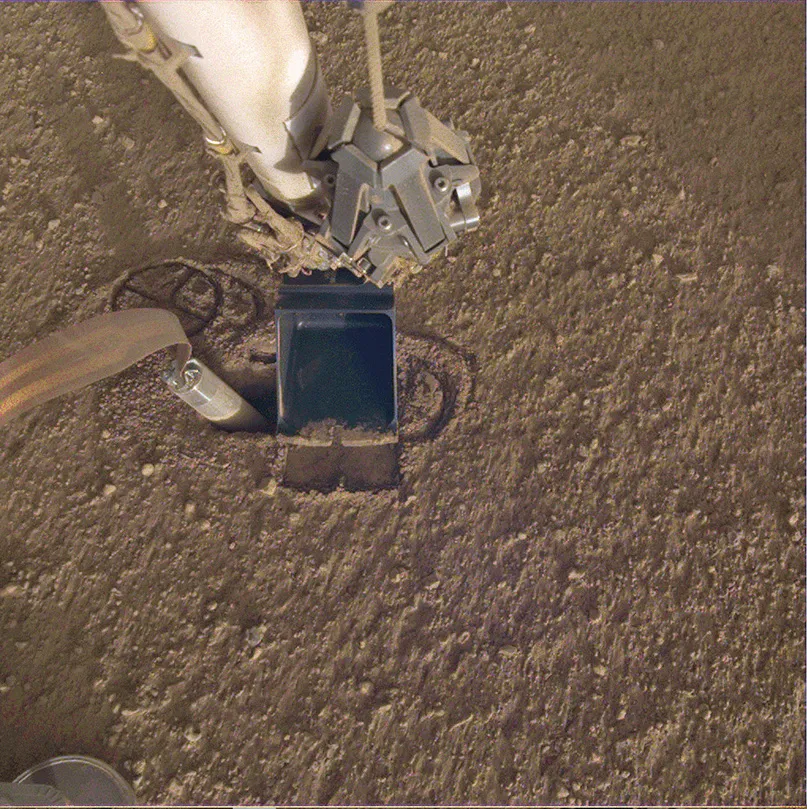
A second attempt to proceed by pinning the Mole led to a second, smaller reversal in January 2020. After much soul-searching, the team decided to go all in on Plan C: positioning the scoop on the back cap of the Mole, a smidge away from the delicate tether, and shoving it down into the regolith. This strategy had been rejected several months earlier as being too risky. But, as Ali puts it, “People became less concerned about the tether as they became more desperate.”
After countless dry runs at JPL, and to minimize the chances of inadvertently clipping the tether, the Arm Team decided to divide the maneuver into five separate steps. After each command was executed on Mars, data and images would be studied on Earth before proceeding.
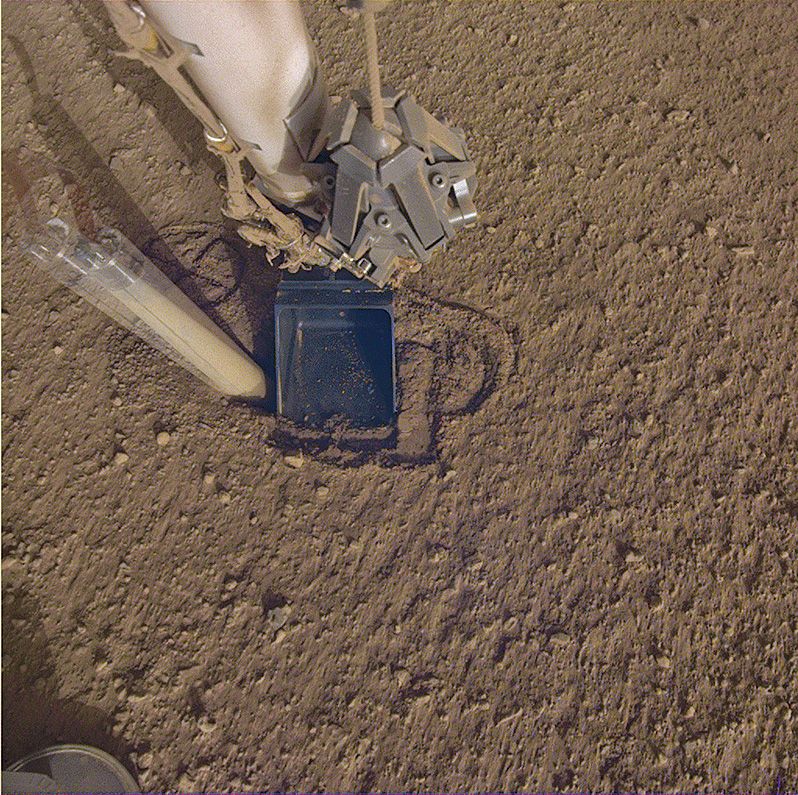
The fourth cycle was the most critical. “I just wanted to barely touch the back cap, or what we referred to on the team as ‘kissing the Mole,’” Ali says. “The fifth cycle was solely to push down hard on the Mole, and it wasn’t that nerve-racking because I could see that the scoop was right where I wanted.” Sure enough, the operation went off without a hitch, and the scoop continued to exert pressure on the back cap until it hit the surface of Mars.

This past June, InSight performed a “Free Mole” test to see if it could make any progress without the arm lending a helping hand. Hammering didn’t produce the intended results, presumably because there still was not enough friction from the regolith.
To save money, InSight was designed with a limited operations budget. Toward the end, commands were sent to Mars on a relaxed cadence of once every two weeks. Mission planners were eager to conserve power because dust is gathering on the solar panels and winter is coming.
“The process has been getting slower and slower, and that has been taking a bit of a toll on my morale,” Hudson admitted last fall. “Whether it will eventually get us to the point where the Mole can dig freely, I cannot say. I’m hopeful, and I think there’s a definite possibility that it could do so. But I cannot in any way say how likely it is. I have made such predictions before, and Mars has said, ‘Nuh-uh. Nope.’ ”
Banerdt insists that the overall mission has been a success. The seismometer and radio antennas have worked flawlessly, and even though the Mole hasn’t fulfilled its role as a heat-flow probe, it’s provided lots of data about Martian geology. But on January 9, the hammer finally fell (500 times, with no progress) on the Mole.
“We’ve given it everything we’ve got, but Mars and our heroic Mole remain incompatible,” said Spohn in a NASA press release. “Fortunately, we’ve learned a lot that will benefit future missions that attempt to dig into the subsurface.”
You could almost hear him sigh.
Note: This article has been updated from the version that ran in the print version of the Feb./March 2021 issue, to include the decision to terminate the rescue efforts.

Subscribe to Air & Space Magazine Now
This story is a selection from the February/March issue of Air & Space magazine